آشنايي با مفهوم X-By-Wire


- توضیحات
- دسته: مجموعه شماره 6
- منتشر شده در شنبه, 23 دی 1391 18:55
- نوشته شده توسط حامد تقيپور، كوروس معبر، علي تالاري
آشنايي با مفهوم X-By-Wire
نويسنده : حامد تقيپور، كوروس معبر، علي تالاري
امروزه در صنعت خودرو تلاش زيادي بهمنظور افزايش تعداد سيستمهاي مرتبط با ايمنيخودرو صورت ميگيرد و ايمني سرنشينان، خواسته اصلي مصرفكنندگان خودرو است. از سوي ديگر، قوانيني که توسط دولتها وضع ميشود ايمني سرنشينان را به عنوان الزام اصلي دربردارند. بيشک افزايش واحدهاي کنترل ايمنيي خودرو، باعث افزايش بيش از پيش ايمنيي سرنشينان خودرو خواهد شد. اضافه شدن اين واحدهاي کنترلي، زمينهساز فراغت و آزادي راننده از انجام کارهاي تکراري شده و باعث ميشود هنگام وقوع حوادث، راننده بتواند بهترين تصميم را اتخاذ کند زيرا اين سيستمها به او در يافتن بهترين راهحل، کمک بسيار زيادي ميکنند.
پيادهسازي چنين سيستم هوشمند الکترونيکي نياز به کنترل مستقيم فرمان خودرو، ترمزها، سيستم تعليق و محرکهاي مربوط به قواي محرکه با توجه به شرايط رانندگي و خودرو و اثرات محيط بر خودرو دارد.
مناسبترين بخش براي پيادهسازي چنين سيستمي، جايگزيني سيستمهاي قديمي مکانيکي/هيدروليکي با سيستمهاي جديد مکاترونيکي (Fault-Tolerant) است.
Fault-Tolerantها، سيستمهايي هستند که در برابر خطاها و خرابيهاي احتمالي مقاوم بوده و بهگونهاي طراحي شدهاند که حتي با وقوع خرابيهاي مهم، از کار بازنميايستند. مثلاً، نسخه ISO 11898-3 از باس CAN در مقابل بسياري از خطاها و خرابيهاي مهم حتي اتصال کوتاه شدن باس، همچنان به کار خود ادامه ميدهد و از کار نميايستد. اين قابليت را ميتوان به صورت سخت يا نرمافزاري، با افزودن قطعات يدکي پشتيبان، پيادهسازي کرد. مثلاً، در بسياري از سيستمهاي کنترلي با حساسيت بالا، از دو منبع تغذيه استفاده ميشود؛ يک منبع تغذيه اصلي و يک منبع تغذيه پشتيبان که در صورت خرابي منبع اول، منبع دوم به صورت خودکار وارد سيستم شده و مدارات را تغذيه ميکند.
سيستمهاي X-By-wire بايد فرمانهاي ارسالي از سوي راننده را دريافت کرده و با تفسير صحيح آنها، درک صحيحي از خواستههاي او با توجه به شرايط خودرو و شرايط محيطي، به دست آورند. سپس، باتوجه به اطلاعات دريافتي، بهترين و صحيحترين وضعيت فرمان خودرو، ترمز و پدال گاز را انتخاب کرده و به خودرو اعمال کنند. مزاياي چنين سيستمي، راحتي، آسايش و ايمنيي بالاي سرنشينان خودرو خواهد بود به حدي که گاهي اين سيستم Safety-By-Wireنيز ناميده ميشود.
هدف اصلي پروژه X-By-Wire رسيدن به ساختاري براي معرفي سيستمهاي ايمني Fault-Tolerant در خودرو است. به همين علت، نام پروژه X-By-Wire انتخاب شد که در آن، X معرف تعداد زيادي سيستمهاي ايمني خودرو نظير فرمان خودرو، ترمز، کنترل قواي محرکه و ... است. کنترل توسط اين سيستمها معمولاً صرفاً الکترونيکي بوده و بخش پشتيباني مکانيکي آنها حذف شده است.
مزاياي سيستم X-By-Wire عبارتند از:
1. هزينه پيادهسازي آنها بسيار پايينتر از سيستمهاي مکانيکي در توليد انبوه است.
2. در اين سيستمها، ميتوان بهصورت کامل وضعيت خودرو و تصميمات گرفته شده از سوي راننده را ثبت و در صورت نياز، مورد تحليل قرار داد.
3. با قرار دادن نرمافزاري جديد درون کنترلرها به راحتي و بدون هيچگونه تغيير مکانيکي ميتوان اشکالات احتمالي را برطرف کرده و يا نسخه جديد نرمافزار را در زماني بسيار کوتاه، وارد سيستم کرد.
هماکنون به دليل عدم اطمينان کافي از عملکرد سيستمهاي صرفاً الکترونيکي، اين سيستمها همراه با سيستم پشتيبان مکانيکي، در خودرو نصب ميشوند تا در صورت عدم عملکرد يا خرابي بخش الکترونيکي مدار، بخش مکانيکي کنترل خودرو را در دست بگيرد و امنيت خودرو دچار اشکال نشود.
اگر سيستمهاي فاقد پشتيبان مکانيکي دچار اشکال شده و عملکرد خود را از دست بدهند، بيگمان فاجعه رخ خواهد داد. مثلاً، اگر در سيستم Steer-by-wire و Brake-by-wire اشکالي رخ دهد، راننده در مواقع خطرناک هيچ کنترلي بر ترمز، فرمان و جهت حرکت خودرو نخواهد داشت. بنابراين، در حال حاضر تلاش متخصصين معطوف به حذف بخش مکانيکي و بهبود سيستم الکترونيکي خودرو تا حصول درجه اطمينان کافي و افزونتر از سيستمهاي مکانيکي شده است.
استاندارهاي مختلفي براي مشخص کردن درجه قابليت اطمينان اين نوع سيستمها و مقدار خطاي مجاز آنها تدوين شده است. مثلاً، مقدار خطاي سيستم Steer-By-Wire که سيستمي حياتي در ايمني خودرو تلقي ميشود، بر طبق استاندارد IEC61508/SIL4 بايد کمتر از 10-8 خطاي اساسي در هر ساعت باشد.
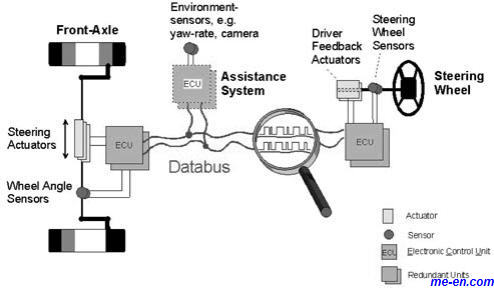
شکل 1، نمايي ساده از سيستم X-By-Wire را نشان ميدهد.
شکل1: بلوک دياگرام X-By-Wire
|
|
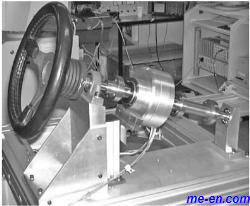
در شکل 2، سيستم آزمايشگاهي Steer-By-Wire نشان داده شده است. همانطور که ميبينيد ارتباط مکانيکي فرمان با چرخها، کاملا حذف شده است.
شکل 2: سيستم آزمايشگاهي Steer-By-Wire
|
|
با توجه به آنچه گفته شد، ميتوان نتيجه گرفت با ورود کنترلکنندههاي الکترونيکي به خودرو، نسل جديدي از وسايل ايمنيي هوشمند معرفي شده است. بر طبق بررسيهاي انجام شده، سهم ايمنييخودرو ناشي از نصب تجهيزات جديد، از سهم تجهيزات قديمي پيشي گرفته است.
گرچه سيستم X-By-Wire ميتواند تجارت توليد خودرو را کاملاً متحول سازد، اما به دليل هزينه بسيار بالاي آن، خودروسازان به تنهايي نميتوانند از عهده مخارج ايجاد تکنولوژي مورد نياز سيستم X-By-Wire برآيند. در نتيجه، شرکتهاي فعال در زمينه اين تکنولوژي به دو گروه تقسيم شدهاند که هر يک فعاليت خود را در خصوص گروهي خاص از پروتکلها متمرکز کردهاند.
براي پيادهسازي تکنولوژي X-By-Wire بايد تعدادي واحد Fault tolerant توسط يک باس بلادرنگ ، به يکديگر متصل شوند. باسهاي بهکار گرفته شده در X-By-Wire شامل باسهاي TTP و Flex Ray است. در نتيجه، دو گروه پروتکل متفاوت در سيستم X-By-Wire در حال توسعه است:
1. گروهي که فعاليتهاي خود را بر شبکههاي Time Triggered متمرکز کردهاند. اين گروه، شامل شرکتهاي پژو سيتروئن، آئودي، فولکس واگن، دلفي و Honeywell است. اين گروه از پروتکلهاي Time Triggered يا به اختصار (TTP) که توسط دانشگاه وين در کشور اتريش طراحي شده است، استفاده ميکنند. TTP براساس پروتکل TDMA طراحي شده است. در اين پروتکل همه اتفاقات براساس برنامه زمانبندي از پيش تعيين شده و غيرقابل تغييري به وقوع ميپيوندد.
2. کنسرسيوم FlexRAY که پروتکل خاص خود (Flex Rey) را تدوين کردهاند. اين پروتکل براساس پروتکل باس Biteflight با معماري Time Triggered طراحي شده است. اين پروتکل، علاوه بر ويژگي Time Triggered، قابليت انعطاف بسيار زيادي دارد. اعضاي اين کنسرسيوم عبارتند از: جنرال موتورز، دايملر/کرايسلر، BMW، موتورولا، فيليپس و بوش.
چکيده
براي پيادهسازي تکنولوژي X-By-Wire بايد تعدادي واحد Fault tolerant توسط يک باس بلادرنگ به يکديگر متصل شوند. باسهاي به کار گرفته شده در X-By-Wire شامل باسهاي TTP، Flex Ray است.



{kind=link}